
Eungchang Mason Lee
Ph.D. student in KAIST, South Korea (a.k.a 용산동쌍가락지)
GTSAM 튜토리얼
Pose Graph Optimization (PGO) for SLAM
2023-07-15
주저리주저리
- SLAM을 항상 접할 수 밖에 없는 환경에 있다. 연구실이 워낙 SLAM을 잘하기도 하고, 내가 아무리 exploration이나 high level path planning 알고리즘을 작성해서 드론에 실험하려고 해도, 결국 드론은 SLAM이 없으면 비행이 불가능하기에…
- 드론은 무게가 중요하니까 처음엔 VO, VIO를 사용했었다. 너무 쉽게 발산해서… 대회때라든지 쓴맛을 많이 봐서 자연스럽게 LiDAR SLAM으로 넘어오게 되었다. 요새는 SLAM까지 안가더라도 LIO만 써도 너무 정확하게 pose가 추정이 된다.
- 그럼에도, loop-closing으로 정밀한 map을 만들어서 저장할 필요가 가끔 있다. Visualization 용도로 예쁜 3D map을 만들때나, 동일한 환경에서 로봇이 반복 작업을 수행할때는 SLAM을 반복해서 쓸 필요 없이 scan-to-map matching기반 localization만 사용해도 되기때문.
주저리주저리
- SLAM을 항상 접할 수 밖에 없는 환경에 있다. 연구실이 워낙 SLAM을 잘하기도 하고, 내가 아무리 exploration이나 high level path planning 알고리즘을 작성해서 드론에 실험하려고 해도, 결국 드론은 SLAM이 없으면 비행이 불가능하기에…
- 드론은 무게가 중요하니까 처음엔 VO, VIO를 사용했었다. 너무 쉽게 발산해서… 대회때라든지 쓴맛을 많이 봐서 자연스럽게 LiDAR SLAM으로 넘어오게 되었다. 요새는 SLAM까지 안가더라도 LIO만 써도 너무 정확하게 pose가 추정이 된다.
- 그럼에도, loop-closing으로 정밀한 map을 만들어서 저장할 필요가 가끔 있다. Visualization 용도로 예쁜 3D map을 만들때나, 동일한 환경에서 로봇이 반복 작업을 수행할때는 SLAM을 반복해서 쓸 필요 없이 scan-to-map matching기반 localization만 사용해도 되기때문.
그래서 해당 포스트에서는
- GTSAM을 사용해서 SLAM을 위한 PGO(pose graph optimization)를 구현하는 방법에 대해 설명하고자 한다. (다른 용도도 많지만 only PGO for SLAM)
- 더 다양한 튜토리얼은 공식 홈페이지 튜토리얼을 참고하면 된다.
- 자세히는 아래 내용을 차례대로 설명하고자 한다.
- 예제 코드
FactorvsValuesin GTSAMgtsam::ISAM2.updatevsgtsam::LevenbergMarquardtOptimizergtsam::ISAM2.update(graph, initial_estimation)vsgtsam::ISAM2.update()(특히 multiple times of update)
1. 예제 코드
- 생각보다 쉬우니 바로 예제 코드 먼저 살펴보자. 해당 코드는 최근에 코딩 및 작업한 FAST-LIO-SAM 혹은 FAST-LIO-SAM-QN repository에 실제 사용된 코드 중 필요한 일부만 가져와서 정리한 코드이다.
////// GTSAM headers
#include <gtsam/geometry/Rot3.h>
#include <gtsam/geometry/Point3.h>
#include <gtsam/geometry/Pose3.h>
#include <gtsam/slam/PriorFactor.h>
#include <gtsam/slam/BetweenFactor.h>
#include <gtsam/nonlinear/NonlinearFactorGraph.h>
#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>
#include <gtsam/nonlinear/Values.h>
#include <gtsam/nonlinear/ISAM2.h>
using namespace std;
////// GTSAM variables
shared_ptr<gtsam::ISAM2> m_isam_handler = nullptr;
gtsam::NonlinearFactorGraph m_gtsam_graph;
gtsam::Values m_init_esti; // initial estimation (초기 위치 추정치)
gtsam::Values m_corrected_esti; //Graph optimized된 보정된 위치 추정치
int m_keyframe_index = 0;
////// GTSAM init
gtsam::ISAM2Params isam_params_;
isam_params_.relinearizeThreshold = 0.01;
isam_params_.relinearizeSkip = 1;
m_isam_handler = std::make_shared<gtsam::ISAM2>(isam_params_);
////// Odometry callback function
void odometry_callback_function(current_odometry) //실제 함수 아님, pseudo code
{
if (!initialized) // 최초 1회만 odometry를 Priorfactor로 추가
{
gtsam::noiseModel::Diagonal::shared_ptr prior_noise = gtsam::noiseModel::Diagonal::Variances((gtsam::Vector(6) << 1e-4, 1e-4, 1e-4, 1e-4, 1e-4, 1e-4).finished()); // rad*rad for roll, pitch, yaw and meter*meter for x, y, z
// for the first odometry, priorfactor
m_gtsam_graph.add(gtsam::PriorFactor<gtsam::Pose3>(0, odometry_to_gtsam_pose(current_odometry), prior_noise));
m_init_esti.insert(m_current_keyframe_idx, odometry_to_gtsam_pose(current_odometry));
m_keyframe_index++;
initialized = true;
}
else //그 이후 odometry callback 마다
{
if (if_keyframe_or_not(current_odometry)) //keyframe인지 검사하고 keyframe이면
{
///// 1. keyframe사이의 pose 변화를 graph에 추가
gtsam::noiseModel::Diagonal::shared_ptr odom_noise = gtsam::noiseModel::Diagonal::Variances((gtsam::Vector(6) << 1e-4, 1e-4, 1e-4, 1e-2, 1e-2, 1e-2).finished());
gtsam::Pose3 pose_from = odometry_to_gtsam_pose(last_odometry);
gtsam::Pose3 pose_to = odometry_to_gtsam_pose(current_odometry);
// 직전, 현재 keyframe odometry 사이의 odometry 변화값을 BetweenFactor로 그래프에 추가
m_gtsam_graph.add(gtsam::BetweenFactor<gtsam::Pose3>(m_keyframe_index-1, m_keyframe_index, pose_from.between(pose_to), odom_noise));
m_init_esti.insert(m_keyframe_index, pose_to);
m_keyframe_index++;
last_odometry = current_odometry; //다음 iteration을 위해 직전 odometry 저장
///// 2. loop closing factor
bool if_loop_closed = false;
// 과거의 keyframe들과 현재 keyframe을 비교해서, loop closing이
// 일어날 수 있을 가능성이 있는지 파악 (예: 일정 거리 이내에 있으나 시간이 일정 시간 이상 경과)
if (if_loop_candidate_or_not(current_odometry))
{
//가장 loop 가능성이 높은 keyframe 반환
the_most_loop_likely_keyframe = get_the_most_loop_likely_keyframe(current_odometry);
//현재 keyframe, loop 가능성 높은 keyframe 사이를 매칭해서 pose 변환 반환 (e.g., ICP 등)
loop_match_result = loop_matching(current_odometry, the_most_loop_likely_keyframe);
// 실제로 loop-closed 되었으면
if (loop_match_result.loop_closed)
{
noise = loop_match_result.noise;
loop_pose_tf = loop_match_result.pose_transformation;
past_pose = the_most_loop_likely_keyframe.pose;
past_pose_index = the_most_loop_likely_keyframe.pose.index;
current_odometry_index = m_keyframe_index-1; // becaus of ++ from the above line
// 현재 keyframe과 loop-closed 된 keyframe간의
// pose 변화만큼을 graph에 BetweenFactor로 추가
gtsam::noiseModel::Diagonal::shared_ptr loop_noise = gtsam::noiseModel::Diagonal::Variances((gtsam::Vector(6) << noise, noise, noise, noise, noise, noise).finished());
gtsam::Pose3 pose_from = odometry_to_gtsam_pose(loop_pose_tf * current_odometry);
gtsam::Pose3 pose_to = odometry_to_gtsam_pose(past_pose);
m_gtsam_graph.add(gtsam::BetweenFactor<gtsam::Pose3>(current_odometry_index, past_pose_index, pose_from.between(pose_to), loop_noise));
if_loop_closed = true;
}
}
///// 3. Optimize
//m_corrected_esti = gtsam::LevenbergMarquardtOptimizer(m_gtsam_graph, m_init_esti).optimize();
m_isam_handler->update(m_gtsam_graph, m_init_esti);
m_isam_handler->update();
if (if_loop_closed)
{
m_isam_handler->update();
m_isam_handler->update();
m_isam_handler->update();
}
m_gtsam_graph.resize(0);
m_init_esti.clear();
// 보정된 위치 추정치
m_corrected_esti = m_isam_handler->calculateEstimate();
}
}
}
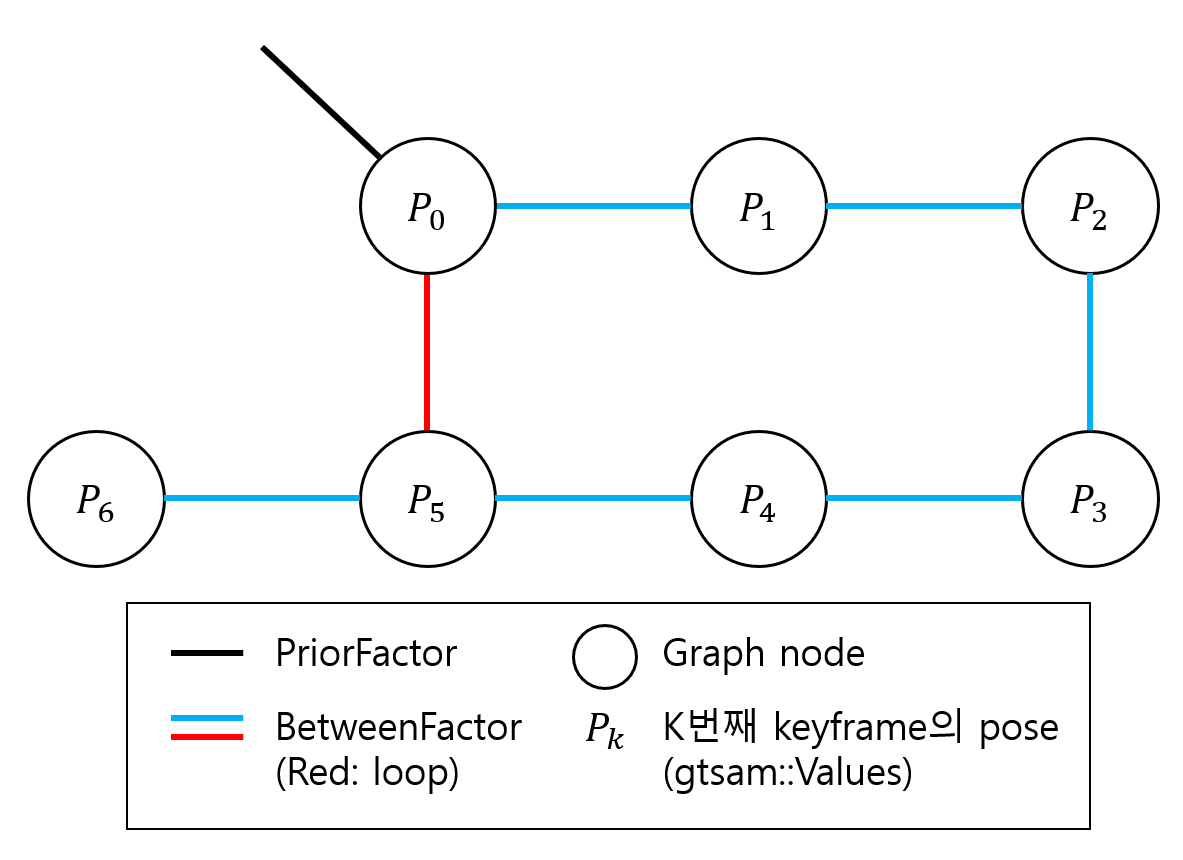
- 조금 긴 것 같은데, 별거 없다. 그림과 함께 보자.
- 최초 odometry는 PriorFactor로 graph에 추가한다.
- Keyframe 사이의 pose변화를 BetweenFactor로 graph에 추가한다. (keyframe 계산 없이 모든 odometry를 graph에 추가하면… 연산량도 어마어마하고 오히려 redundancy가 accuracy를 해친다.)
- 현재 keyframe과 과거 keyframes 사이에 loop-closing을 검사 및 계산해서 BetweenFactor로 graph에 추가한다.
- Graph를 optimize 한다.
처음 보는 사람들은, 대충 알긴 알겠는데 몇 가지 “왜?” 하는 부분들이 생긴다 => 뒤에서 하나씩 설명한다.
2. Factor vs Values in GTSAM
- 코드에서 분명히 graph(
m_gtsam_graph)에 PriorFactor, BetweenFactor로 odometry의 변화량, loop-closing의 값 등을 더 해줬는데 gtsam::Values(m_init_esti)에 한번 더 값을 insert해준다. - 게다가 loop-closing 계산 뒤 BetweenFactor를 add해주는 곳에서는 Values에 아무런 값도 insert하지 않는다.
- 이 부분에 대해서 공식 홈페이지 튜토리얼의 2.3절에서는 다음과 같이 설명한다.
- The factor graph and its embodiment in code specify the joint probability distribution over the entire trajectory of the robot, rather than just the last pose. This smoothing view of the world gives GTSAM its name: “smoothing and mapping”. Later in this document we will talk about how we can also use GTSAM to do filtering (which you often do not want to do) or incremental inference (which we do all the time).
- A factor graph in GTSAM is just the specification of the probability density, and the corresponding FactorGraph class and its derived classes do not ever contain a “solution”. Rather, there is a separate type Values that is used to specify specific values, which can then be used to evaluate the probability (or, more commonly, the error) associated with particular values.
- The latter point is often a point of confusion with beginning users of GTSAM. It helps to remember that when designing GTSAM we took a functional approach of classes corresponding to mathematical objects, which are usually immutable. You should think of a factor graph as a function to be applied to values rather than as an object to be modified.
- 뭔 소리냐면, graph (Factor)는 연결만 나타내고 있다고 생각하면 편하고, Values는 변하는 값이라고 생각하면 편하다.
- (Factor는 node 사이의 joint probability, 즉, 확률 값을 나타내고 Values는 말 그대로 위치 추정치 값이다.)
- 아니 그니까 graph (Factor)만 가지고 있어도 연결도 나타내고 안에 값도 들어있으니 optimize할 때 마다 값도 알아서 변하고 우리는 변한 값만 출력해서 받아 쓰면 되지 않는가? (난 이게 제일 헷갈렸다.)
- 다음 그림을 보면, 조금 더 이해가 쉽다. (아니면 죄송 ㅠㅠ)
- 만약 내가 헷갈렸던 것처럼 Factor만 가지고 있다고 생각해보자.
- 원래 1절에서 등장한 그림만 봤을때는 아무런 문제가 없을 것이다. Odometry로만 graph가 구성되어있으니 loop closing이 일어나든 말든 node 자체의 값이 변해버리면 되지 않나? 생각했던 것인데,
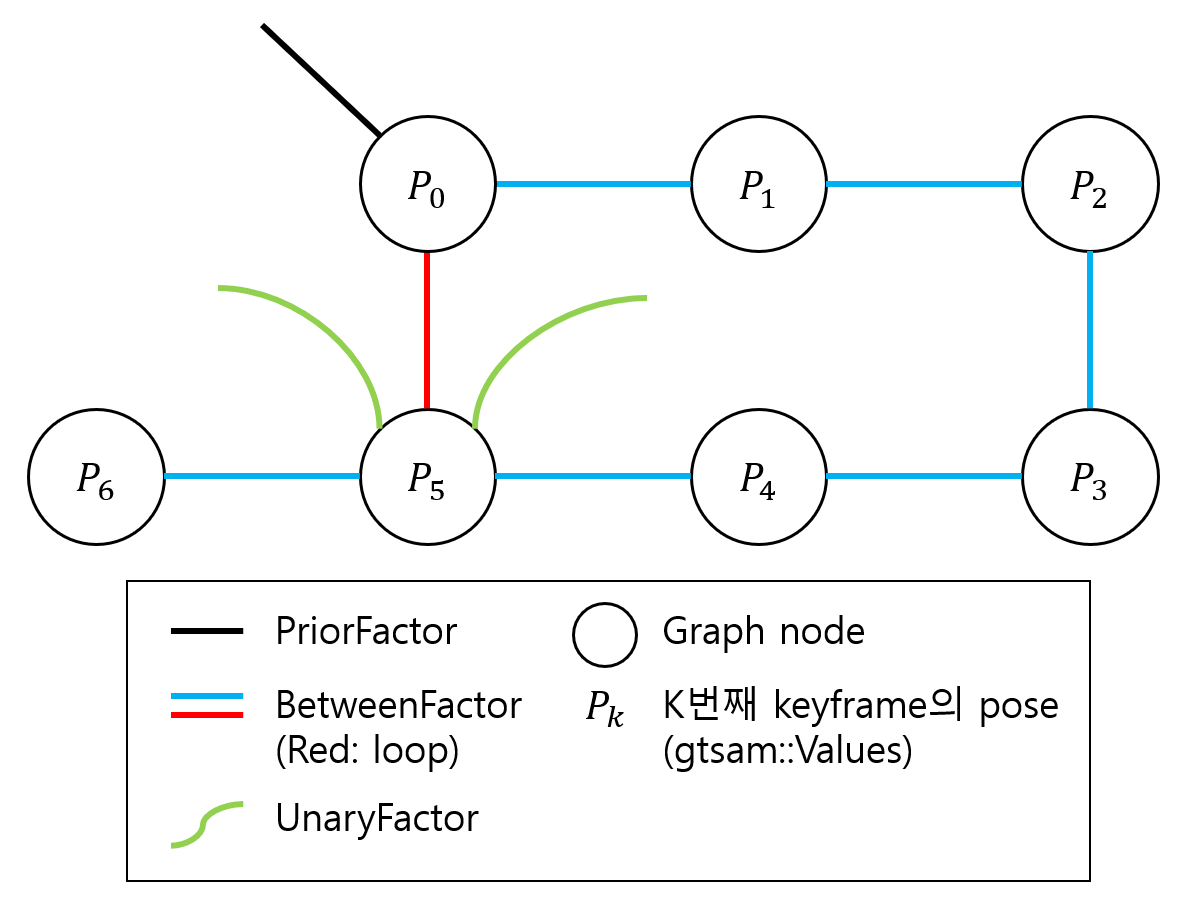
- 아래 그림처럼 UnaryFactor가 추가되었다고 생각해보자 (예: GPS 센서 값 등). Loop closing이 일어나서 P5 노드의 값 자체가 바뀌어버리면 UnaryFactor가 의미하는 값이 뭔가 이상해진다.
- 분명 loop closing이 일어나기 전의 P5 노드의 값에 대한 관계를 그래프에 추가한 것인데, P5노드의 값이 바뀌었으니 UnaryFactor 값도 그에 맞게 바뀌어야 하는 건가? 근데 GPS 센서 측정 값인데 그게 바뀌어도 되나?
- 따라서 loop closing이 일어나든 말든, UnaryFactor가 추가되든 말든 graph는 graph대로 연결 관계에 대한 값을 고정되게 가지고 있고, 이와 별개로 위치 추정치는 따로 변수로 (Values) 가지고 있으면 이런 문제가 없다.
3. gtsam::ISAM2.update vs gtsam::LevenbergMarquardtOptimizer
- 코드에서 optimize하는 부분을 보면 주석된 부분이 있다.
- 다시 잘 살펴 보면, 한 줄로 해결할 수 있을 것 같은데 굳이 여러 줄로 나누어서 optimize하고 graph랑 Values 초기화하고, 보정된 값을 획득한다.
- 실제로 한 줄짜리 LM Optimizer로 optimize해도 동일한 결과를 획득한다. => 하지만 연산 시간이 엄청 길어진다. Graph가 점점 증가하면 할수록.
- GTSAM은 Georgia Tech SAM인데, 논문에서 정식 명칙은 Incremental SAM이다. - 논문 1, 논문 2
- 즉, 한 줄 짜리 LM Optimizer는 그래프 전체를 받아와서 전체에 대해서 nonlinear optimization을 수행한다. 연산량이 많고, 점점 많아질 수밖에 없다.
- ISAM update는 incremental하게 graph의 변화된 부분만 파악해서 update 및 optimization을 수행한다. 참고: update 부분 코드
- 변화된 부분을 파악하는 비용을 최소화 하기 위해서 graph.resize(0)과 Values.clear()를 수행한다.
//// 이 한 줄이랑
{
m_corrected_esti = gtsam::LevenbergMarquardtOptimizer(m_gtsam_graph, m_init_esti).optimize();
}
//// 이 여러 줄이랑 같은 역할임
{
m_isam_handler->update(m_gtsam_graph, m_init_esti);
m_gtsam_graph.resize(0);
m_init_esti.clear();
m_corrected_esti = m_isam_handler->calculateEstimate();
}
4. gtsam::ISAM2.update(graph, initial_estimation) vs gtsam::ISAM2.update()
- 위 3절과 마찬가지로 코드에 이상한 점이 있다. gtsam::ISAM2.update(graph, esti)로 한번 update 했는데 (update에서 optimize도 함께 이루어짐), 여러 번 반복해서, 심지어 함수 인자도 없이 update한다.
m_isam_handler->update(m_gtsam_graph, m_init_esti); //한 번 했는데
m_isam_handler->update(); //여러 번 인자도 없이 반복한다.
if (if_loop_closed) //심지어 loop-closing 되면
{
m_isam_handler->update(); //인자도 없이 또 반복한다.
m_isam_handler->update(); //인자도 없이 또또 반복한다.
m_isam_handler->update(); //인자도 없이 또또또 반복한다.
}
- GTSAM의 example code 중 여기를 보면 다음과 같이 주석에 적혀있다.
- Each call to iSAM2 update() performs one iteration of the iterative nonlinear solver. If accuracy is desired at the expense of time, update() can be called additional times to perform multiple optimizer iterations every step.
- 즉, 그냥 여러 번 호출하면 여러 번 iteration으로 optimize하는 것과 같으므로 원하는 만큼 해라! 이거임.
- 실제로 ISAM2 헤더파일의 update 부분을 보면, 아무 인자 없이 update 함수를 호출해도 다 default 인자로 넘겨주게 되어있고, ISAM2 소스파일의 update 부분을 보면, 인자로 전달 받은 graph의 변화된 부분만 추적해서 알아서 optimize한다.
- 그러면 굳이 코드에서
m_gtsam_graph.resize(0)할 필요 없지 않나? => 없어도 되지만 update 함수 내에서 “graph의 변화된 부분을 추적”하는 연산을 최소화하기 위해 필요하다. - 그러면 update를 한 127431829479번 정도 호출하면 완전 빨리 수렴하고 값도 정확해 지는거 아님? => 이것은 경험에 의한 것… 실제로 LIO-SAM 코드를 보면 5회만 실행하는데, 저자에 따르면 그게 가장 좋았다고 한다.. 여기 참고
- 우리 연구실 사람들도, 나도 update를 몇 번 해야 좋은지 많이 테스트 해봤고 LIO-SAM 저자도 많이 해봤겠지만… 5번이 가장 적당하더라는 결론…
- 너무 많이 호출하면 시간도 아깝고 뭔가 발산하는 양상을 띈다.
5. 참고
- Factor를 추가할 때
noise를 설정하게 되어있다. 그리고 공식 홈페이지 tutorial을 보면 모든 것을 확률과 관련해서 설명한다. - 왜 SLAM에서 Gaussian 분포를 사용하는가? 왜 모든 것이 확률로 표현되는가?
- Bayesian 추론, Maximum a posteriori, Maximum likelihood estimation 그리고 이 세가지와 SLAM의 관계에 대해서 참고해보면 좋다.
- 짧게 설명하면 어차피 noise를 수학적으로 정확하게 나타낼 수는 없으니 우리가 잘 아는 Gaussian 분포를 사용하고, Gaussian 분포를 사용하면 Gaussian 분포 값들의 곱은 Gaussian 분포를 따른다. 이를 이용해서 현재 odometry와 다른 센서의 측정값들로 로봇 pose와 landmark의 pose를 확률을 극대화 하는 방향으로 추론해내는게 SLAM이라고 할 수 있다(고 한다.)
- 김기섭님 블로그에 굉장히 잘 설명되어있으니 보면 너무너무 좋다 두번보고 세번보길 추천 - 링크, 링크2
결론 및 추가 정보
- GTSAM은 사용이 쉽다. 대신 자유도가 낮다. Ceres 같은 nonlinear optimization solver는 사용이 어려운 대신 자유도가 높아서 별의 별 값들을 변수로 설정 가능하고, 무슨 옵션이 있고 뭐 등등…
- 난 모르겠고 걍 PGO만 해서 SLAM만 하면된다? GTSAM을 쓰자.
- 이 글을 볼 일도 없고 봤더라도 이런 수준 낮은 글이? 할 정도로 SLAM에 익숙한 분들은 필요에 맞게 Ceres를 잘 쓰고 계실 것으로 예상 합니다…
- 24년 5월 27일 추가 정보 - 최근에 우리 연구실 선배인 임형태 박사가 알려 준건데, GTSAM (iSAM2) 내부에서 Bayes tree를 기반으로 어느 부분만 update해야하는지 스스로 다루는데, 이 부분이 Ceres solver와 GTSAM의 큰 차이점 중 하나인 것 같다고 한다.
- 자세한 내용은 여기의 81~82 페이지 참고. 긁적긁적 SLAM 어렵당.