InnoCORE is a highly competitive, large-scale research initiative; only 8 out of 25 proposals within KAIST were selected. This project aims to
develop next-generation autonomous robots through 5D world models, involving 23 principal investigators across 9 partner universities.
As the team leader in Prof. Myung’s lab, I played a central role in aggregating research content from all participating labs and leading the writing
of the proposal and presentation materials, directly contributing to the successful project award.
Development of Drone System for Diagnosis of Porcelain Insulators in Overhead Transmission Lines
I participated in this project during: 2023.01 - 2024.07
In this project, we develop an autonomous drone manipulation framework for diagnosis of porcelain insulators in transmission lines. We are developing a robust multi-LiDAR SLAM, real-time obstacle avoidance path planner, and adaptive attitude / trajectory tracking controllers.
Research of Coverage Path Planner for 3D Reconstruction with UAVs
2022.01 - 2022.12 | Supported by Confidential
Keywords: Drone, Quadrotor UAV, Coverage Path Planning, 3D Reconstruction, Obstacle avoidance, Exploration, SLAM
In this project, we developed an energy-efficient and obstacle-aware coverage path planner for UAVs to accurately reconstruct the target structures with high-resolution. The detailed information is confidential.
In this project, we developed adaptive multi-robot localization method. With the high fidelity networking, artificial intelligent cooperative control, and mobile ground control station, unmanned swarm system has been researched to operate cyber-physical systems.
Autonomous Drone Navigation for Power Line Inspection in Underground
In this project, we developed indoor SLAM, navigation, and exploration method to operate a UAV exploring the underground power line tunnel safely. In consideration with the limited payload and computational resource of the UAV, the precomputed and lightweight local exploration planner was proposed. Additionally, to charge the battery of the UAV on the UGV with the docking station, relative pose estimation EKF and autonomous landing algorithm was developed.
A Study on the Visual-Inertial Navigation System of Artificial Intelligent Unmanned Aerial Vehicle for Reconnaissance and Exploration
Research on Unmanned Aerial Vehicles has been actively conducted in recent years. In particular, the UAV to explore an unknown, GNSS-denied environment is required, but the self-localization method, such as Visual Inertial Odometry, is mandatory to operate it. Considering the payload and the operating time of the UAV, lightweight and low-power consuming cameras and IMU are preferred, and even Object Detection and 3D Mapping can be obtained using a RGB-D camera. In this work, we developed a 3D Mapping system including object positions in an unknown and GNSS-denied environment for the UAV with a RGB-D camera. The system is demonstrated in Gazebo simulator, and the quantitative and qualitative results are obtained.
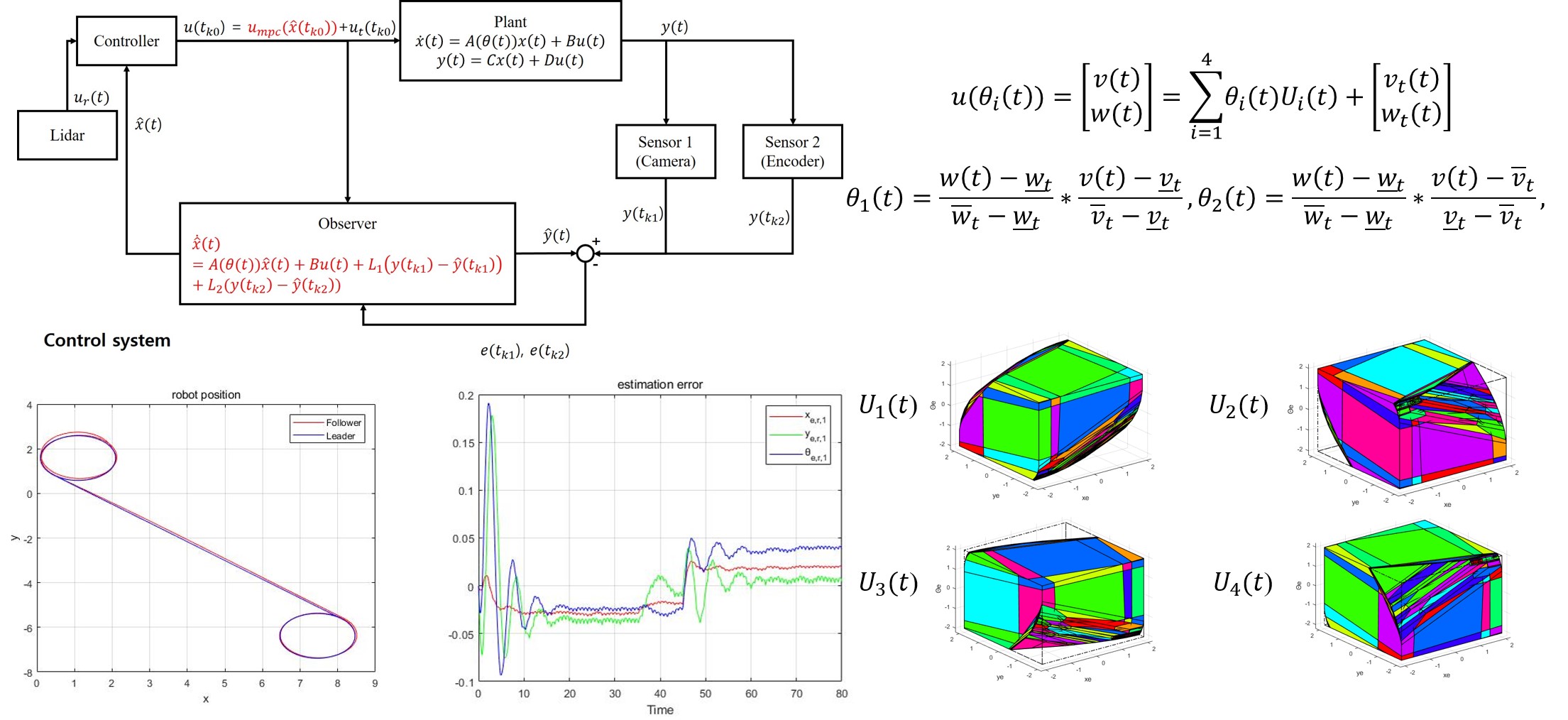
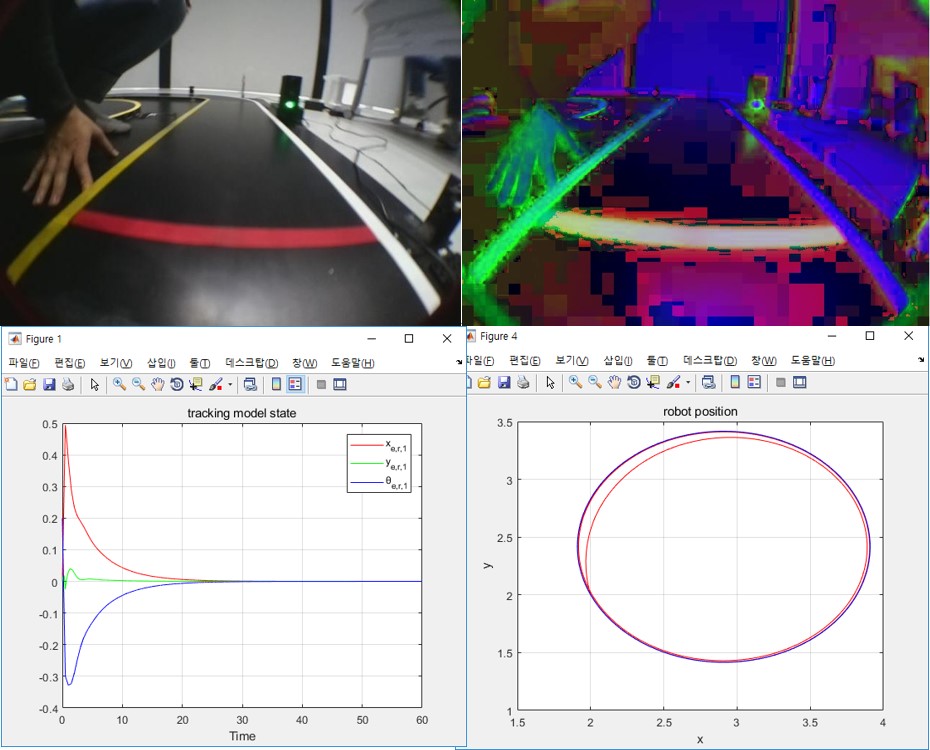
Research on Multi-Rate Sensor Fusion based Mobile Robot Model Predictive Control System
2018.04 - 2018.12 | Supported by ETRI
Keywords: Sampled-data system, Multi-rate Sampled-data system, Model Predictive Control, Cyber-Physical System
Measured data from Vehicle’s multi sensor system have asynchronous sampling rate,
The final goal of this research project is to design multi-rate state estimator that can assume exact state using asynchronous data. Model-based prediction controller is designed to perform at real-time for improving control performance. In addition, ROS-based mobile robot data processing system, LiDAR-based path planning, sign recognition algorithm are researched for implementing autonomous system.
Overall system: Multi-rate Observer, Controller, and results
Competitions
2026 Nothing Stands Still Challenge
2026.04 - 2026.06 | Hosted by Nothing Stands Still Challenge | Supported by CVPR 2026
Keywords: 3D Point Cloud Registration, Global Registration, Bundle Adjustment, Pose Graph Optimization, Change Detection
Nothing Stands Still Challenge is a CVPR 2026 challenge focused on robust spatiotemporal 3D point cloud registration in dynamic environments.
Our team, CuRaytor, won the 1st place in the challenge.
Our team developed a full multi-stage registration pipeline, including robust global registration, intra-cluster optimization with bundle adjustment and pose graph optimization, inter-cluster optimization and registration, change detection and refinement for optimization, and a novel registration scoring method. I was mainly responsible for the intra-cluster optimization module, designing and implementing the bundle adjustment and pose graph optimization pipeline for reliable local registration refinement.
2022 ADD Autonomous Flight Competition in Battlefield Situations
The competition aims to develop an autonomous drone to pass through complex and dangerous outdoor obstacles, infiltrate an unknown two-story building, detect hidden targets, create precise 3D maps including target types and coordinates, and return to the starting point safely. I developed main framework including local/global path planners, 3D map logger with the detected target positions and a decision-making system.
I participated in this project during: 2022.01 - 2022.02
Source code of this project is available at Github
Low Power Computer Vision Challenges: Chase aims to develop light and fast computer vision solutions to be used in many fields including Robotics. In 2022, the goal of the competition was to track the non-uniform motion vehicle at constant distance away with a quadrotor UAV, while avoiding obstacles. We estimated the trajectory of the moving vehicle in the form of 5th order polynomial using the detected center point with YOLO network. Then, Adaptive weight Model Predictive Controller (AMPC) is designed to track the target effectively.
I participated in this project during: 2020.4 - 2020.11
Korea Robot Aircraft Competition aims to promote the revival of the domestic aviation industry and respond to various demands, this competition will expand the base of unmanned aviation-related technologies through participation in high school and university (graduate) students, and contribute to discovering and fostering human resources in related industries. The competition has been held every year since 2002 for the purpose of raising awareness of unmanned aerial vehicles (drones) and training manpower through various missions using unmanned aerial vehicles (drones) developed by college students.
AlphaPilot is the first large-scale open innovation challenge of its kind focused on advancing artificial intelligence (AI) and autonomy.
Supported and hosted by DRL, Lockheed Martin and NVIDIA. For the 1 Million dollar prize only for the winner.
The challenge consists of Preliminary test and Real competition.
Firstly, DRL and Lockheed martin used FlightGoggles Simulator from MIT to narrow down 424 teams over 81 countries into 9 Qualifiers.
Only 9 Qualifiers participated real RACEs using DRL made drone ‘RACER AI’ which is equipped with RTOS like kernel customized NVIDIA Jetson Xavier and few sensors. Our team won the 3rd prize.
FlightGoggles simulator and RACER-AI drone
2018 R-BIZ Challenge Turtlebot3 Autorace
2018.06 - 2018.11 | Hosted by ROBOTIS, MathWorks Korea, ICROS | Supported by KIRIA, MOTIE
Keywords: Mobile Robots, Autonomous Driving Vehicles, Lyapunov function-based Control
I participated in this project during: 2018.6 - 2018.11
Source code of this competition is available at Github
ROS-based autonomous driving system for mobile robot (Turtlebot3) is developed for finishing the racing track with diverse missions. Using MATLAB, Lyapunov functional is proved to stabilize the error model of mobile robot. Simple HOG-based Cascade Object Detector is trained using Computer Vision Toolbox of MatLab and then all systems are coded with Python to control the robot in real-time. Only 35 dollar Raspberry Pi computer was adopted and it was equipped with 1-D LiDAR and mono camera. Our team won the Mathworks Korea Special Prize.
Race GIF, Controller design, and Signal&Line detection
Eungchang Lee, Junho Choi, Duckyu Choi, Nahrendra I Made Aswin, Hyungtae Lim, Seunghyun Lee, Seungwon Song, and Hyun Myung, “SLAM-based autonomous flying patrol drone system and remote control interface (SLAM 기반 자율 비행 순찰 드론 시스템 및 원격 제어 인터페이스),” 2023.11.14.
Eungchang Lee, Hyungtae Lim, and Hyun Myung, “Adaptive and robust 3D SLAM method that adjusts parameters depending on the environments, and Application of SLAM method for unmanned aerial vehicle flight in GNSS-denied environments (환경에 적응적으로 해상도를 조절하는 강인한 3차원 SLAM 기술과 위성항법장치 음영상황에서 무인비행체의 비행을 위한 SLAM 기술의 적용),” 2023.05.01.
The goal of this project was to develop Unity-based ROS2 multi-robot simulator for various types of mobile robots including wheeled, quadruped, quadrotor aerial robots equipped with IMUs, cameras, and LiDARs. I made the overall system architecture and implemented the simulation environment in Unity.
I served as a developer and a maintainer for this project during: 2022.09 - 2022.12
Source code of this competition is available at Github
KHNP Virtual Robot Challenge aims to develop an autonomous navigation algorithm and a robust controller to complete diverse and challenging tasks including obstacle avoidance, exploration, and enduring the wind disturbances. I made Gazebo maps for the competition and coded scoring GUI. Additionally, I coded sample controllers for the quadrotor UAV.
Palm Tree Field Exploration and Tree Identification with UAV / UGV
I participated in this project during: 2021.11 - 2022.05
The final goal of this research project is to develop an exploration system for monitoring unknown palm tree orchard environments while avoiding collisions and figuring out appearances of trees. I developed the whole system including pointcloud data processing, path planning, and controller. A state‑of‑the‑art open‑sourced SLAM algorithm is utilized.
I served as a developer and a maintainer for this project during: 2021.09 - 2021.12
Source code of this competition is available at Github
KHNP Virtual Robot Challenge aims to develop an autonomous navigation algorithm and a robust controller to complete diverse and challenging tasks including obstacle avoidance, manipulation for grasping a cube, climbing stairs, and enduring the disturbances. I made Gazebo maps for the competition and coded scoring GUI. Additionally, I coded sample controllers for the manipulator and the quadruped robot.